October 5, 2024
Under Construction
Blog posts are coming soon!
Robotics Engineer | Path Planning & Control

I'm a Robotics Engineer with over 3.5 years of experience in Autonomous systems development. Currently pursuing my Master's in Robotics at the University of Maryland, College Park.
My expertise spans multi-agent fleet management, path planning, navigation, simulation, hardware interfacing and control. I've worked extensively on Level 4 Autonomous delivery robots at Ottonomy.
As an early engineer at a high growth startup, I got to contribute to many things, from controlling a BLDC motor to managing international robot deployments, scaleing from prototypes to deployments across 10+ countries.
Relevant Coursework: Software Development for Robotics, Introduction to Robot Modeling, Control of Robotic Systems
Relevant Coursework: Manufacturing Processes, Kinematics and Dynamics, Machine Design, Operations Research, CAD & CAM, Automation, Programming in C++ and Python


Learned and applied various Lean manufacturing techniques on suspension manufacturing lines to reduce quality errors. The final project addressed a recurring production line issue through the implementation of the Poka Yoke technique.
Hands-on learning with advanced precision manufacturing machines and tools, including Wire EDM, 5-axis CNC, CNC Lathe, VMC and CMM. The final project involved designing an aerospace component in Siemens NX, writing G & M codes manually as well as generating using CAM software, and machining the component using CNC turning.
October 5, 2024
Blog posts are coming soon!
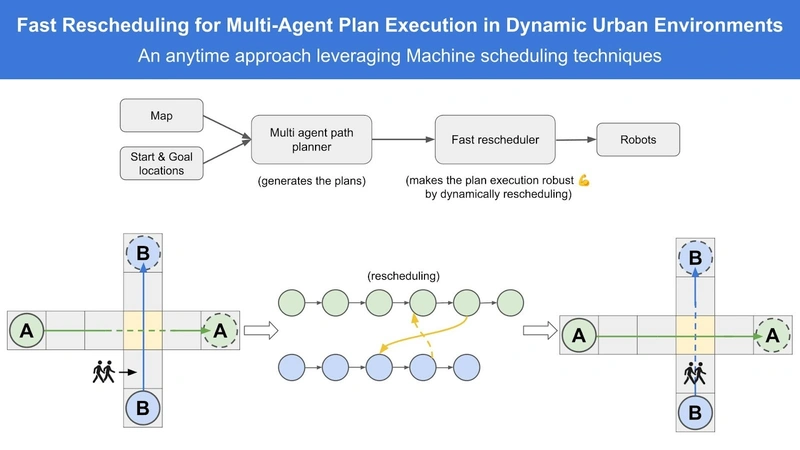
Fast Rescheduling for Multi-Agent Plan Execution in Dynamic Urban Environments: A Machine Scheduling Perspective


Tether Tension Monitoring System
A 2-part safety device for tethered Aerostats, that monitors the tension in the tether, and wireless notifies ground the station in case of any anomaly. It also has a mechanism to safely deflate and release hydrogen gas present in Aerostat to avoid any accidents.
Developed at IIT Bombay's LTA Lab, under guidance of Prof. RS. Pant
Portable Device for Measuring Wood Hardness
A portable device to perform the Janka hardness test (hardness of wood) without the requirement of cutting down for collecting samples
→ View PatentAutomatic Electric Iron Power Switching Device
A retrofit device that automatically powers off electric irons when idle, reducing energy consumption and preventing fabric or ironing board burns
→ View PatentFor exceptional contributions that endure beyond tenure. Award given to me, 9 months after leaving Ottonomy, recognizing lasting impact on the company.
As the Vice President of University Robotics Club, I represented university in many national robotics competitions and hackathons, organised robotics events at the annual university fests and actively contributed to the club's success This award was given to me by Dean Student welfare, Col. Mohit Bawa, recognizing my contributions
Beyond work, I'm passionate about adventure and endurance activities. I enjoy cycling, running, trekking, skiing, swimming, paragliding, river rafting, and other such activities.
I am currently training to participate in the Ironman 70.3 triathlon.